Buck-Konverter verstehen: effizient abwärts wandeln
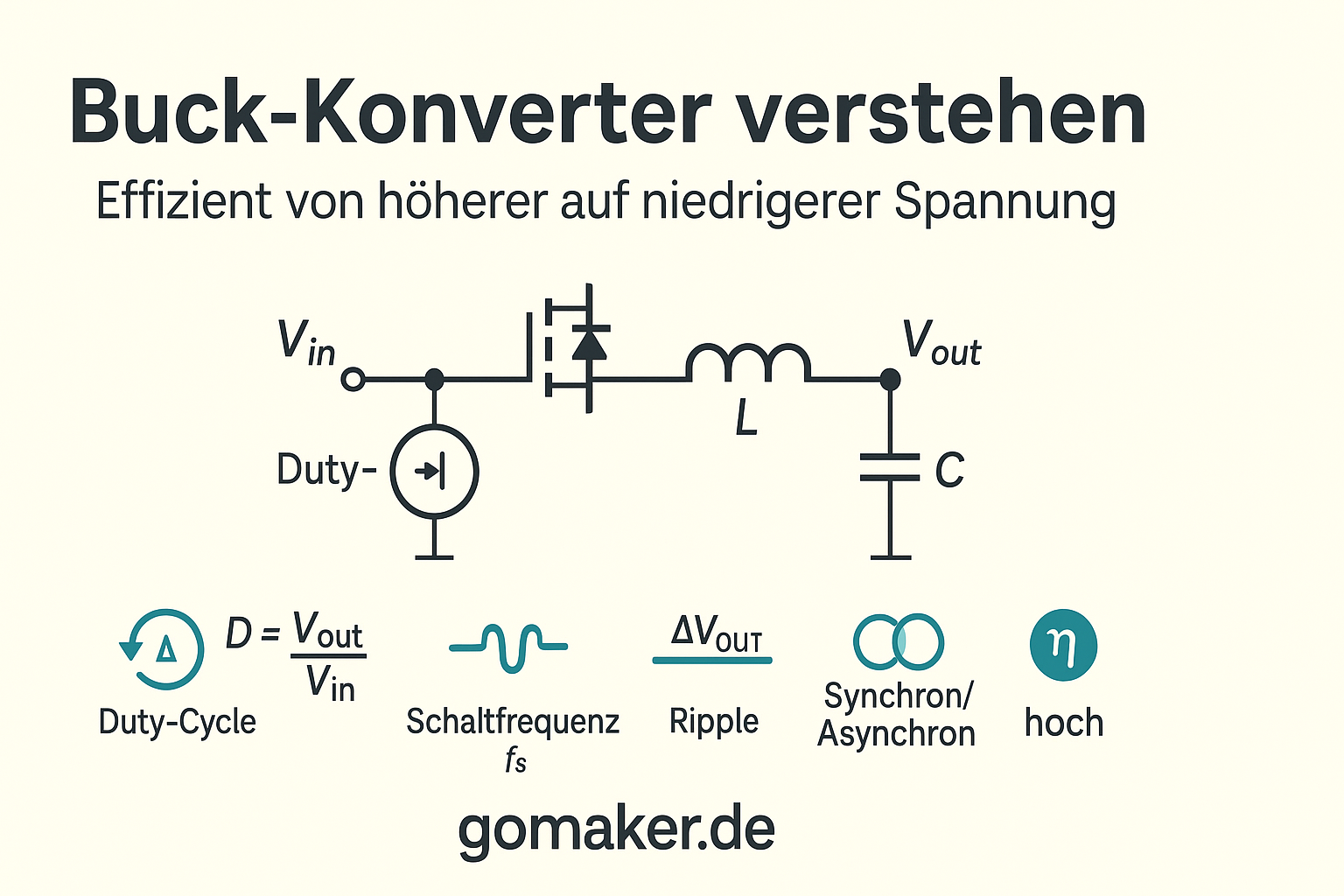
Ein Buck-Konverter (Abwärtswandler) reduziert eine höhere Eingangsspannung effizient auf eine niedrigere Ausgangsspannung. Herzstück sind Schalter (MOSFET), Diode (oder zweiter MOSFET), Induktivität und Ausgangskondensator. Durch schnelles Schalten und Filtern entsteht eine nahezu konstante Ausgangsspannung bei geringeren Verlusten als bei linearen Reglern.
Kerngleichungen (idealisierter CCM-Betrieb)
-
Duty-Cycle:
D ≈ Vout / Vin
-
Induktorripple:
ΔIL = (Vin − Vout) · D / (L · fs)
-
Cap-Ripple (vereinfacht):
ΔVout ≈ ΔIL / (8 · fs · C) (ohne ESR)
-
Wirkungsgrad grob:
η ≈ Pout/(Pout+Pverl) (Schalt- & Leitverluste, Diode/MOSFET, ESR)
Synchron vs. asynchron
-
Asynchron: Diode als Freilaufpfad → einfacher, günstiger, aber Diodenverlust
VF·I.
-
Synchron: zweiter MOSFET ersetzt die Diode → höherer Wirkungsgrad, aber komplexer (Dead-Time, Shoot-Through vermeiden).
CCM vs. DCM
-
CCM (Continuous Conduction Mode): Spulenstrom wird nie null → geringere Ripple, bessere Dynamik bei Last.
-
DCM: Spulenstrom fällt auf null → gut für sehr kleine Lasten, aber andere Formeln/Regelung.
Schneller Auslegungs-Workflow
-
Rahmendaten:
Vin,min/max, Vout, Iout,max, fs, ΔIL (z. B. 20–40 % von Iout), ΔVout.
-
L wählen über
ΔIL: größer = weniger Ripple, aber trägere Dynamik/größerer Bauteil.
-
C wählen (Ripple/Transienten): Low-ESR (MLCC/Polymer); ESR bestimmt oft den realen Ripple.
-
Schalter/Diode: RDS(on), VDS/I-Rating, Gate-Ladung; bei asynchron: Schottky mit geringer VF.
-
Loop-Kompensation: Extern/Intern je nach Controller; Stabilitätsmargen (Phasenreserve) anpeilen.
-
Layout: Heißer Strompfad ultrakurz, Masse-Stern, Eingangselko direkt am Schalter, Rückstrompfade beachten.
Beispielrechnung (≈5 V → 3,3 V @ 1 A, fs=500 kHz)
D ≈ 3,3/5 = 0,66- Wähle
ΔIL = 0,3 A → L ≈ (Vin−Vout)·D/(ΔIL·fs) ≈ (1,7·0,66)/(0,3·500k) ≈ 7,5 µH → nimm 10 µH Standardwert.
- Für
ΔVout ≤ 20 mV (nur Kapazitätsanteil) → C ≥ ΔIL/(8·fs·ΔV) ≈ 0,3/(8·500k·0,02) ≈ 3,75 µF. Real: 2×10 µF MLCC (ESR/Derating berücksichtigen).
Mini-Beispiel (Arduino): Ausgangsspannung überwachen & Fehler melden
Viele Buck-Module haben einen Power-Good/OK-Pin (PG). Das Beispiel liest Vout über einen Spannungsteiler und meldet Unterspannung.
const int PIN_VOUT=A0, PIN_PG=7;
const float VREF=5.0, R1=100000.0, R2=100000.0, VOUT_MIN=3.2;
float read_vout() {
int adc=analogRead(PIN_VOUT);
float u_adc=adc*(VREF/1023.0);
return u_adc*(R1+R2)/R2;
}
void setup() {
pinMode(PIN_PG, INPUT_PULLUP);
Serial.begin(115200);
}
void loop() {
float v=read_vout();
bool pg=digitalRead(PIN_PG);
Serial.print("Vout="); Serial.print(v,3); Serial.print("V PG="); Serial.println(pg);
if(v<VOUT_MIN) Serial.println("WARN: Unterspannung");
delay(200);
}
Python-Helfer: L & C aus Ziel-Ripple abschätzen
def buck_params(vin, vout, iout, fs, ripple_frac=0.3, dv=0.02):
"""ripple_frac: ΔIL/Iout, dv: erlaubter ΔVout in V (nur C-Anteil, ohne ESR)"""
D = vout/vin
dIL = iout*ripple_frac
L = ((vin-vout)*D)/( dIL*fs )
C = dIL/(8.0*fs*dv)
return {"D":D, "ΔIL":dIL, "L_H":L, "C_F":C}
p = buck_params(5.0, 3.3, 1.0, 500_000.0)
print(p)
EMI & Layout-Tipps
- „Heißer“ Strompfad (Schalter-Pin → Diode/MOSFET → Eingangselko → zurück) extrem kurz & kompakt.
- Eingangselko direkt an VIN/GND des IC platzieren; breites GND-Kupfer, Sternpunkt am Sense/AGND.
- Induktivität abseits von Signal-Leitungen; Rückstrompfade visualisieren (Loops klein halten).
- Snubber/Bootstrap/Comp-Netz nahe am IC; Feedback-Teiler weit weg von SW-Knoten führen.
- Eingangs-Ferrit + RC-Snubber optional gegen Klingeln/EMI.
Typische Fehler & schnelle Checks
-
Falsche Induktivität → zu kleines L = hoher Ripple/Verlust; zu großes L = träge Regelung.
-
MLCC-Derating ignoriert → „10 µF“ effektiv nur 3–5 µF bei Bias → mehr/andere Typen einplanen.
-
ESR unterschätzt → Ripple/Regelstabilität leidet; Polymer/MLCC-Mix hilft.
-
Schlechtes Layout → Überschwingen/EMI; Datenblatt-Layout exakt übernehmen.
-
Thermik → RDS(on)/Dioden-VF, Induktor-Kupferverlust nicht bedacht.
Checkliste
- Rahmendaten & Modus (CCM/DCM) festgelegt
- L & C über Ripple/Transienten dimensioniert, ESR beachtet
- Schalter/Diode/MOSFET passend (Spannung, Strom, Verlust, Gate-Charge)
- Loop-Kompensation/Stabilität geprüft (Hersteller-Vorgaben)
- Layout gemäß Referenzdesign; heiße Schleifen minimal
- Thermik/EMI getestet; ggf. Snubber/Ferrite
Fazit
Ein sauber ausgelegter Buck-Konverter liefert eine stabile, effiziente Versorgung bei kompakten Abmessungen. Mit den richtigen Bauteilen, einem präzisen Layout und etwas Reserve bei L/C bekommst du niedrigen Ripple, robuste Dynamik und hohen Wirkungsgrad.
Tipp: Starte mit der Referenzschaltung des IC-Herstellers – gleiche Bauteilwerte, gleiches Layout. Danach schrittweise optimieren (L/C, Frequenz, MOSFET).